

9.ทำการอัดโปรแกรมโดยเข้าไป ที่เมนู Tool แล้วเลือกไปที่ Program AVR เลือก Auto Connect

รูปที่ 2-19
10.ทำการเลือกไฟล์นามสกุล .hex ที่จะทำการอัพโหลดและเมื่ออัพโหลดสำเร็จจะขึ้นข้อความบนหน้าจอ LCD ดังรูปข้างล่างนี้

รูปที่ 2-20

รูปที่ 2-21
11.เมื่อทำการกดปุ่ม B หุ่นยนต์จะทำการหมุนตัวซ้าย-ขวาไปมาเพื่อทำการจดจำความเข้มแสงของพื้นและเส้น

รูปที่ 2-22

รูปที่ 2-23
12.เมื่อหุ่นยนต์หยุดหมุนแล้วก็ทำการกดปุ่ม B อีกครั้งที่หน้าจอLCD จะขึ้นคำว่า Go เพื่อที่จะทำการวิ่งตามเส้น

รูปที่ 2-24
ทดสอบ Pololu 3pi Robot วิ่งตามเส้น Line Follower
การทดลอง ข้างต้นนี้เป็นการทดลองโดยการวิ่งตามเส้นแบบธรรมดาทั่วๆไป กล่าวคือเมื่อค่าที่อ่านได้จากเซนเซอร์ตรงตามเงื่อนไขไหนก็จะทำตามเงื่อนไข นั้น ทำให้การวิ่งไม่ค่อยราบเรียบซักเท่าไหร่ แล้วที่เราเห็นมันวิ่งตามเส้นกันในคลิปวิดีโอที่มันวิ่งได้อย่างราบเรียบและ รวดเร็วล่ะมันทำยังไง??? บางท่านอาจจะนึกไม่ออกว่าจะมีวิธีไหนอีกที่มันจะทำให้วิ่งตามเส้นได้ดีกว่า การทำตามเงื่อนไขที่กำหนด แต่สำหรับคนที่เคยมีประสบการณ์หรือเคยเรียน "วิชาระบบควบคุม" มาคงเคยได้เรียนการควบคุมแบบ PID(Proportional-Integral-Derivative) กันมาบ้างแล้ว สำหรับท่านที่ยังไม่รู้จักการควบคุบแบบ PID สามารถดูได้จากรูปข้างล่างนี้ว่ามันทำงานอย่างไรกันครับ
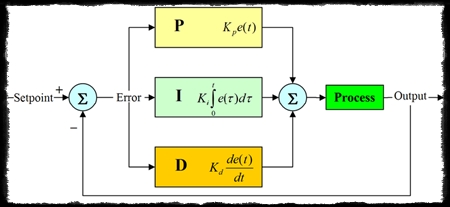
รูปที่ 2-25(http://en.wikipedia.org/wiki/File:Pid-feedback-nct-int-correct.png)
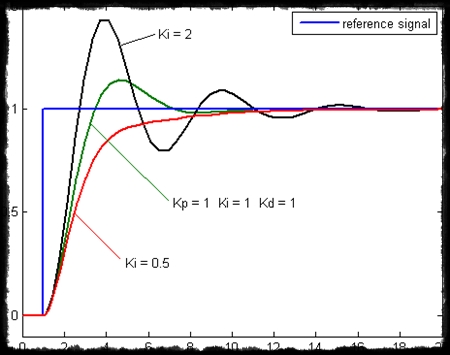
รูปที่ 2-26(http://en.wikipedia.org/wiki/File:Change_with_Ki.png)
แล้ว มันจะเอามาใช้กับการวิ่งตามเส้นได้อย่างไรและจะวิ่งตามเส้นได้ราบเรียบจริง เหรอ? เราลองมาดูของจริงกันเลยดีกว่าครับ โดยทำการเปิดตัวอย่างโปรแกรมของ Pololu3pi ที่มีชื่อว่า 3pi-linefollower-pid แล้วก็ทำตามขั้นตอนที่เคยได้ทำมาแล้วตามข้างต้น หลังจากนั้นก็เริ่มทดสอบกันเลย มาดูกันดีกว่าว่าพอใส่ตัวควบคุม PID เข้าไปแล้วมันจะวิ่งตามเส้นได้ราบเรียบและรวดเร็วจริงไหม

รูปที่ 2-27
ทดสอบ Pololu 3pi Robot วิ่งตามเส้น Line Follower PID
สำหรับการ ทดลองต่อไปจะเป็นการทดสอบการวิ่งในเขาวงกต จากตัวอย่างในโฟลเดอร์ที่ชื่อ 3pi-mazesolver ลองมาดูกันหน่อยครับว่าเจ้าหุ่นตัวนี้จะสามารถวิ่งไปได้ถึงจุดหมายที่กำหนด หรือไม่? โดยการวิ่งรอบแรกจะวิ่งเพื่อทำการจดจำเส้นทางของเขาวงกต(Maze) ก่อน และเมื่อรอบแรกไปถึงจุดหมายแล้วจะขึ้นคำว่า Solved ขึ้นมาแสดงว่าเจ้าหุ่นได้ทำการจดจำเส้นทางที่จะวิ่งในเขาวงกตเรียบร้อยแล้ว เมื่อนำเจ้าหุ่นกลับมาที่จุดเริ่มต้นและทำการทดสอบวิ่งอีกรอบก็จะเห็นว่า เจ้า 3pi สามารถวิ่งไปถึงจุดหมายปลายทางได้ตามที่ได้ทำการจดจำไว้แล้ว

รูปที่ 2-28
ทดสอบ Pololu 3pi Robot วิ่งในเขาวงกต 3pi-mazesolver
เป็นอย่าง ไรก้นบ้างครับ สำหรับรีวิวการทดสอบการวิ่งตามเส้นของเจ้าหุ่น Pololu 3pi ตัวนี้หลายคนคงหายสงสัยกันแล้วนะครับ ว่าทำไมมันถึงวิ่งตามเส้นได้รายเรียบและรวดเร็ว สมคำร่ำลือ สำหรับคราวนี้คงขอจบเพียงแต่นี้ก่อน เอาไว้คราวหน้าจะมารีวิวการวิ่งใน Step เทพ กันนะครับ


