ประเภทของ หุ่นยนต์อุตสาหกรรม
|
||||||||||||||||||||||||||||
| ในยุคเริ่ม ต้นของการส่งเสริมอุตสาหกรรมในประเทศไทยจะเห็นได้ว่ามีโรงงานต่าง ๆ เข้ามาตั้งฐานผลิตในเมืองไทยจำนวนมากทำให้เกิดนิคมอุตสาหกรรมขึ้นหลายแห่ง ทั้งนี้เนื่องจากรัฐบาลมีนโยบายส่งเสริมอุตสาหกรรมที่ชัดเจน ค่าแรงงานถูก ลดรายจ่ายเนื่องจากภาษีการนำเข้าของสินค้า และวัตถุดิบบางตัว แต่ ณ ปัจจุบันนี้ค่าแรงบ้านเราสูงขึ้นและสูงกว่าประเทศเพื่อนบ้าน เช่น จีน เวียดนาม อินโดนีเซีย ฯลฯ ในขณะเดียวกันคุณภาพแรงงานไม่ได้มาตรฐาน ขาดความรู้และทักษะจึงทำให้หลายบริษัทได้ย้ายฐานการผลิตไปยังประเทศที่มีค่า แรงงานถูกกว่า และอีกหลายบริษัทที่พยายามปรับตัวเอง โดยมีการนำเทคโนโลยีระบบอัตโนมัติ (Automation Technology) เข้ามาใช้งานเพื่อให้สินค้าสามารถแข่งขันในตลาดโลกได้ทั้งในเรื่องราคา และคุณภาพ โดยเฉพาะในเรื่องคุณภาพ ปัจจุบันโรงงานที่ผลิตสินค้าส่งออกหรือส่งให้กับลูกค้าที่เป็นบริษัทของต่าง ประเทศมักจะประสบปัญหาในเรื่องคุณภาพ มีทั้ง ผลิตสินค้าไม่ได้มาตรฐานตามที่ลูกค้ากำหนด หรือ ผลิตสินค้าไม่ทันตามกำหนดเวลา อาจเนื่องจากมีการเปลี่ยนรุ่นผลิตภัณฑ์อยู่บ่อยๆ ต้องใช้เวลาในการ Set up ปัจจุบันจึงมีการนำเทคโนโลยีต่าง ๆ เข้ามาใช้ หนึ่งในเทคโนโลยีที่มีความยืดหยุ่นสูง ได้แก่ หุ่นยนต์อุตสาหกรรม เนื่องจากการเปลี่ยนการทำงานสามารถทำได้โดยการเปลี่ยนโปรแกรม นอกจากนี้คุณภาพของผลิตภัณฑ์ที่ได้มีความสม่ำเสมอเป็นมาตรฐานเดียวกัน | ||||||||||||||||||||||||||||
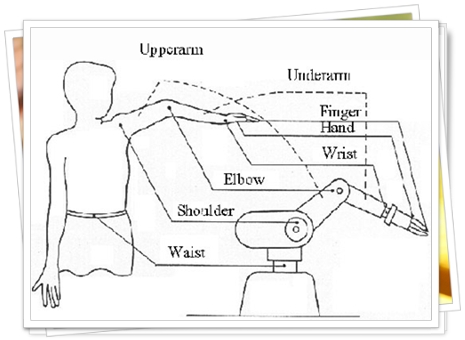
| การทำงานของ หุ่นยนต์อุตสาหกรรมจะเลียนแบบร่างกายของมนุษย์โดยจะเลียนแบบเฉพาะส่วนของ ร่างกายที่จะนำไปใช้ประโยชน์ ในอุตสาหกรรมเท่านั้น นั่นคือช่วงแขนของมนุษย์ ดังนั้น บางคนอาจจะได้ยินคำว่าแขนกล ซึ่งก็หมายถึงหุ่นยนต์อุตสาหกรรม การทำงานของหุ่นยนต์อุตสาหกรรมเปรียบเทียบกับแขนมนุษย์ แสดงดังรูป | ||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||
| ปัจจุบันและในอนาคตหุ่นยนต์อุตสาหกรรมจะเข้ามามีบทบาทในอุตสาหกรรมมากขึ้น โดยจะทำงานแทนมนุษย์ในงานต่าง ๆ เหล่านี้งานที่อันตราย เช่น งานยกเหล็กเข้าเตาหลอม งานที่เกี่ยวข้องกับสารเคมีงานซ้ำซากน่าเบื่อ เช่น งานยกสินค้าจากสายงานการผลิต งานประกอบ งานบรรจุผลิตภัณฑ์งานที่ต้องการคุณภาพมาตรฐานเดียวกัน เช่น งานเชื่อม งานตัด งานที่ต้องใช้ทักษะความชำนาญสูง เช่น งานเชื่อมแนว เชื่อมเลเซอร์งานที่ต้องใช้ความละเอียดประณีต เช่น งานประกอบชิ้นส่วนอิเล็กทรอนิกส์ งานตรวจสอบ (Inspection) ฯลฯ | ||||||||||||||||||||||||||||
| หุ่นยนต์ หรือ ภาษาอังกฤษเขียนว่า Robot มาจากบทละครของ นายคาเรล คาเปก (Karel Kapek) นักแต่งนิยายชาว เช็ก เรื่อง R.U.R (Rossum’s Universal Robots) ซึ่งหมายถึงคนงานคำจำกัดความของ หุ่นยนต์ตามมาตรฐาน ISO 8373 An automatically controlled, reprogrammable, multipurpose, manipulator programmable in three or more axes which may be either fixed in place or mobile for use in industrial automation application หุ่นยนต์ คือ เครื่องจักรที่ถูกควบคุมอัตโนมัติ สามารถเขียนโปรแกรมใหม่ได้ ใช้งานเอนกประสงค์ โปรแกรมการเคลื่อนที่จะต้องสามารถโปรแกรมให้เคลื่อนที่ได้อย่างน้อย 3 แกนหรือมากกว่า หุ่นยนต์อาจจะยึดอยู่กับที่หรือย้ายตำแหน่ง (Mobile) เพื่อใช้ในงานอุตสาหกรรม |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
| โดยทั่วไปการแบ่งชนิดของหุ่นยนต์จะแบ่งตามลักษณะรูปทรงของพื้นที่ทำงาน (Envelope Geometric) แต่ก่อนจะอธิบายชนิดของหุ่นยนต์ขออธิบายการทำงานของจุดต่อ (Joint) ของหุ่นยนต์ อุตสาหกรรมซึ่งในขั้นพื้นฐานมี 2 ชนิดด้วยกัน ดังนี้ |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
| จุดต่อ (Joint) ทั้งสองแบบเมื่อนำมาต่อเข้าด้วยกันอย่างน้อย 3 แกนหลักจะได้พื้นที่ทำงาน ( Work envelope) ที่มีลักษณะแตกต่างกันไป ซึ่งสามารถนำมาแบ่งชนิดของหุ่นยนต์ได้ดังต่อไปนี้ |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
1. Cartesian (gantry) Robot |
||||||||||||||||||||||||||||
| แกนทั้ง 3 ของหุ่นยนต์จะเคลื่อนที่เป็นแบบเชิงเส้น (Prismatic) ถ้าโครงสร้างมีลักษณะคล้าย Overhead Crane จะเรียกว่าเป็นหุ่นยนต์ชนิด gantry แต่ถ้าหุ่นยนต์ไม่มีขาตั้งหรือขาเป็นแบบอื่น เรียกว่า ชนิด Cartesian | ||||||||||||||||||||||||||||
ข้อดี 1.เคลื่อนที่เป็นแนวเส้นตรงทั้ง 3 มิติ 2.การ เคลื่อนที่สามารถทำความเข้าใจง่าย 3.มีส่วนประกอบง่าย ๆ 4.โครงสร้าง แข็งแรงตลอดการเคลื่อนที่ |
||||||||||||||||||||||||||||
| ข้อเสีย 1.ต้องการพื้นที่ติดตั้งมาก 2.บริเวณ ที่หุ่นยนต์เข้าไปทำงานได้ จะเล็กกว่าขนาดของตัวหุ่นยนต์ 3.ไม่สามารถ เข้าถึงวัตถุจากทิศทางข้างใต้ได้ 4.แกนแบบเชิงเส้นจะ Seal เพื่อป้องกันฝุ่นและของเหลวได้ยาก |
||||||||||||||||||||||||||||
| การประยุกต์ใช้งาน เนื่องจากโครงสร้างมีความแข็งแรงตลอดแนวการเคลื่อนที่ ดังนั้นจึงเหมาะกับงานเคลื่อนย้ายของหนัก ๆ หรือเรียกว่างาน Pick-and-Place เช่นใช้โหลดชิ้นงานเข้าเครื่องจักร (Machine loading) ,ใช้จัดเก็บชิ้นงาน (Stacking)นอกจากนี้ยังสามารถใช้ในงานประกอบ (Assembly) ที่ไม่ต้องการเข้าถึงในลักษณะที่มีมุมหมุน เช่น ประกอบอุปกรณ์อิเล็กทรอนิกส์ และงาน Test ต่าง ๆ |
||||||||||||||||||||||||||||
2. Cylindrical Robot |
||||||||||||||||||||||||||||
| หุ่นยนต์ประเภทนี้จะมีแกนที่ 2 (ไหล่) และแกนที่ 3 (ข้อศอก) เป็นแบบ prismatic ส่วนแกนที่ 1 (เอว) จะเป็นแบบหมุน (revolute) ทำให้การเคลื่อนที่ได้พื้นที่การทำงานเป็นรูปทรงกระบอก ดังรูป | ||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
| ข้อดี 1.มีส่วนประกอบไม่ซับซ้อน 2.การเคลื่อน ที่สามารถเข้าใจได้ง่าย 3.สามารถเข้าถึงเครื่องจักรที่มีการเปิด-ปิด หรือเข้าไปในบริเวณที่เป็นช่องหรือโพรงได้ง่าย (Loading) เช่น การโหลดชิ้นงานเข้าเครื่อง CNC |
||||||||||||||||||||||||||||
| ข้อเสีย 1.มี พื้นที่ทำงานจำกัด 2.แกนที่เป็นเชิงเส้นมีความยุ่งยากในการ seal เพื่อป้องกันฝุ่นและของเหลว |
||||||||||||||||||||||||||||
| การประยุกต์ใช้งาน โดยทั่วไปจะใช้ในการหยิบยกชิ้นงาน (Pick-and-Place) หรือป้อนชิ้นงานเข้าเครื่องจักร เพราะสามารถเคลื่อนที่เข้าออกบริเวณที่เป็นช่องโพรงเล็ก ๆ ได้สะดวก |
||||||||||||||||||||||||||||
3. Spherical Robot (Polar) |
||||||||||||||||||||||||||||
| มีสองแกนที่เคลื่อนในลักษณะการหมุน (Revolute Joint) คือแกนที่ 1 (เอว) และแกนที่ 2 (ไหล่) ส่วนแกนที่ 3 (ข้อศอก) จะเป็นลักษณะของการเคลื่อนที่แนวเส้นตรง ดังรูป | ||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
| ข้อดี 1.มีปริมาตรการทำงานมากขึ้นเนื่องจากการ หมุนของแกนที่ 2 (ไหล่) 2.สามารถที่จะก้มลงมาจับชิ้นงานบนพื้นได้ สะดวก |
||||||||||||||||||||||||||||
| ข้อเสีย 1.มี ระบบพิกัด (Coordinate) และส่วนประกอบ ที่ซับซ้อน 2.การเคลื่อนที่และ ระบบควบคุมมีความซับซ้อนขึ้น |
||||||||||||||||||||||||||||
| การประยุกต์ใช้งาน ใช้ ในงานที่มีการเคลื่อนที่ในแนวตั้ง (Vertical) เพียงเล็กน้อย เช่น การโหลดชิ้นงานเข้าออกจากเครื่องปั้ม (Press) หรืออาจจะใช้งานเชื่อมจุด (Spot Welding) |
||||||||||||||||||||||||||||
4. SCARA ROBOT |
||||||||||||||||||||||||||||
| หุ่นยนต์ SCARA (Selective Compliance Assembly Robot Arm) จะมีลักษณะแกนที่ 1 (เอว) และแกนที่ 3 (ข้อศอก) หมุนรอบแกนแนวตั้ง และแกนที่ 2 จะเป็นลักษณะการเคลื่อนที่ขึ้นลง (Prismatic) ดังรูป หุ่นยนต์ SCARA จะเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นยำสูง | ||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
| ข้อดี 1.สามารถเคลื่อนที่ในแนวระนาบ และขึ้นลงได้รวดเร็ว 2.มีความแม่นยำสูง |
||||||||||||||||||||||||||||
| ข้อเสีย 1.มี พื้นที่ทำงานจำกัด 2.ไม่สามารถหมุน (rotation)ในลักษณะมุมต่างๆได้ 3.สามารถ ยกน้ำหนัก (Payload) ได้ไม่มากนัก |
||||||||||||||||||||||||||||
| การประยุกต์ใช้งาน เนื่องจากการเคลื่อนที่ในแนวระนาบและขึ้นลงได้รวดเร็วจึงเหมาะกับ งานประกอบชิ้นส่วนทางอิเล็กทรอนิกส์ซึ่ง ต้องการความรวดเร็วและการเคลื่อนที่ก็ไม่ต้องการ การหมุนมากนัก แต่จะไม่เหมาะกับงานประกอบชิ้นส่วนทางกล (Mechanical part)ซึ่งส่วนใหญ่การประกอบจะอาศัยการหมุน(rotation)ในลักษณะมุมต่างๆ นอกจากนี้ Scara robot ยังเหมาะกับงานตรวจสอบ (Inspection) งานบรรจุภัณฑ์ (Packaging) |
||||||||||||||||||||||||||||
5. Articulated Arm (Revolute) |
||||||||||||||||||||||||||||
| ทุกแกนการเคลื่อนที่จะเป็นแบบหมุน (Revolute) รูปแบบการเคลื่อนที่จะคล้ายกับแขนคน ซึ่งจะประกอบด้วยช่วงเอว ท่อนแขนบน ท่อนแขนล่าง ข้อมือ การเคลื่อนที่ทำให้ได้พื้นที่การทำงาน ดังรูป | ||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||
| ข้อดี 1.เนื่องจากทุกแกนจะเคลื่อนที่ในลักษณะ ของการหมุนทำให้มีความยืดหยุ่นสูงในการเข้าไปยังจุด ต่าง ๆ 2.บริเวณข้อ ต่อ (Joint) สามารถ Seal เพื่อป้องกันฝุ่น ความชื้น หรือน้ำ ได้ง่าย 3.มี พื้นที่การทำงานมาก 4.สามารถเข้าถึงชิ้นงานทั้งจากด้านบน ด้านล่าง 5.เหมาะ กับการใช้มอเตอร์ไฟฟ้า เป็นชุดขับเคลื่อน |
||||||||||||||||||||||||||||
| ข้อเสีย 1.มีระบบพิกัด (Coordinate) ที่ซับซ้อน 2.การเคลื่อนที่และระบบควบคุมทำความ เข้าใจได้ยากขึ้น 3.ควบ คุมให้เคลื่อนที่ในแนวเส้นตรง (Linear) ได้ยาก 4.โครงสร้างไม่มั่นคงตลอด ช่วงการเคลื่อนที่ เพราะบริเวณขอบ Work envelope ปลายแขนจะ5.มีการสั่น ทำให้ความแม่ยำลดลง |
||||||||||||||||||||||||||||
| การประยุกต์ใช้งาน หุ่นยนต์ชนิดนี้สามารถใช้งานได้กว้างขวางเพราะสามารถเข้าถึงตำแหน่งต่าง ๆ ได้ดี เช่นงานเชื่อม Spot Welding, Path Welding ,งานยกของ , งานตัด ,งานทากาว ,งานที่มีการเคลื่อนที่ยาก ๆ เช่น งานพ่นสี งาน sealing ฯลฯ |
||||||||||||||||||||||||||||
| การเลือกหุ่นยนต์ชนิดต่างๆมาใช้งาน ควรพิจารณาให้เหมาะสมกับงานที่ต้องการให้หุ่นยนต์ทำดังที่อธิบายไว้ตอนต้น นอกจากนี้ยังต้องพิจารณาการบริการหลังการขายด้วยเนื่องจากชิ้นส่วนอะไหล่ ส่วนใหญ่ต้องนำเข้าจากต่างประเทศ ซึ่งต้องใช้เวลาในการนำเข้าและราคาแพง ดังนั้นถ้าสามารถเลือกบริษัทที่มีตัวแทนและทีมงานบริการ ( ทีม service) ในเมืองไทยได้จะเป็นการดี และถ้าต้องข้อมูลรายละเอียดลึกลงไป เช่น ผลดี ผลเสีย ของการนำหุ่นยนต์มาใช้งาน การคำนวณต้นทุนต่างๆ ตลอดจน ระยะเวลาการคืนทุน (Payback period) ขณะนี้ทางสถาบันไทย-เยอรมัน ได้ เปิดฝึกอบรมหลักสูตร “ Benefits and Costs for robot Implementation” ซึ่งเป็นหลักสูตรระยะเวลา 1 วัน | ||||||||||||||||||||||||||||
| อ้าง อิง:Robotmatrix,9engineer | ||||||||||||||||||||||||||||