


วันนี้จะพาไปทัวส์การแข่งขันหุ่นยนต์กัน บ้างครับ หลายคนอาจจะยังไม่รู้ ทีมไทยมีส่งหุ่นยนต์เข้าไปแข่งขันกับต่างประเทศด้วย และ งานก็ไม่ได้เป็นงานเล็กๆนะครับ ถ้าเทียบกับคนแล้วก็บอลโลกของคนจริงนี้ล่ะ
ก่อนอื่นขอกล่าวถึงเกมส์ world robocup ก่อนครับ Robocup เป็น การแข่งขันฟุตบอลหุ่นยนต์ ที่เก่าแก่ที่สุดครับ เขาจัดเพื่อจะพัฒนาหุ่นยนต์เข้าไปแข่งกับทีมฟุตบอลที่เป็นมนุษย์จริงๆครับ โดยเขาตั้งเป้าหมายกันว่าปี 2050 จะทำหุ่นยนต์ที่เหมือนคน มาแข่งกับคนจริงๆ ถึงปีนั้น พวกเราคงจะแก่มากๆ ล่ะ (ให้หลานๆ พาเราไปดู ฮ่าๆ)
โดย Robocup จะใช้ศาสตร์ทางด้าน mechanical,electronic ,computer มากครับ หุ่นยนต์จะมีความซับซ้อน มากทั้งคิดและแก้ปัญหาอย่างรวดเร็ว (ตามสไตล์หุ่นยนต์) และ มีอะไรที่เรียนมาในมหาลัย เอามาใช้ยังไม่พอ ครับ งานนี้ต้องศึกษาและทดลอง เทคนิดใหม่ๆ มาใช้ด้วย ฉะนั้นการแข่งขันครั้งนี้ เป็นการช่วยกันทำวิจัยเรื่องหุ่นยนต์ไปด้วยกันครับ เพราะว่าแต่ละมหาลัย เอาหาวิธีที่ดีที่สุด มาประชันกัน งานนี้ ไม่ใช่วิชาการไม่เกี่ยวนะครับ เกี่ยวข้องมากๆ แล้วเอามาไว้จะมาอธิบายกัน
ปีนี้การแข่งขันจัดที่ Grazz ประเทศ Austria ครับ เป็นการแข่งขั้นครั้งที่ สิบห้าแล้ว รายละเอียดเพิ่มเติมเกี่ยวกับ Robocup Org ลิงค์ที่นี้ครับ http://en.wikipedia.org/wiki/RoboCup
คลิ๊ก ดูวีดีโอ บรรยากาศภายในงานแข่งขัน2009 ณ.ประเทศเยอรมันนี
Link: http://www.ayarafun.com
|
|
|
 |
 |

การแข่งขันนะครับ ทีมไทย ส่งไปกัน 4 ทีม 3 ลีคครับ
1. Soccer Humanoid มี TeamKMUTT ของ ม.พระจอมเกล้าธนบุรี ทำคะแนนชนะทีมคู่แข่งดีมากครับ แต่ก้อพลาดเจอทีมแข็งกว่าในรอบ 8 ทีม ตอนนี้ทำได้ดีสุดที่เข้ารอบ 8 ทีม ครับ
ผลการแข่งขันครับ http://www.robocup2009.org/158-0-results
2. Small Size Soccer มี PlasmaZ จาก ม.จุฬา กับ Scuba จาก ม.เกษตร ทั้งสองทีม น่าจะมีสักที่ เอาชนะเลิศกลับมากครับ ดูจากคะแนนยิงประตูดีมากๆ ครับ อันดับต้นๆ ครับ ซึ่งเจ้าแห่ง SSL ตอนนี้เป็นของประเทศไทยครับ ยึดแชมป์เอาไว้ มา สองปีแล้ว ปีนี้ก้อ ไม่พลาดครับ ชนะและได้รางวัลมา มากมายครับ
ทีม Scuba ได้แชมป์ ชนะเลิศ และได้รางวัล พ่วงอีกสอง คือ Technical Challenge กับ Best Exteneded Team Description Paper (ETDP) นอกจากทำหุ่นยนต์ ดีแล้ว ทำเอกสารดูด้วย (น่าเป็นตัวอย่างของวิศวะที่ดีในอนาคตครับ)
ทีม PlasmaZ ได้รางวัลที่ 3 ครับ ถ้าติดตามการแข่งขันดีๆ จะมี match หยุดโลก ไทยเจอไทยก่อน คิดแล้วดีใจ บอลโลกเกมส์นี้ ต่างชาติต้องมาดู match หยุดโลกที่เป็นทีมจากประเทศไทย ใครชนะ match นี้ อีกทีมจะเป็นทีมชนะเลิศเลยที่เดียว
ทีม skuba ทีมชนะเลิศใน SSL กับถ้วยรางวัล สาม ใบ ไปปีเดียวคุ้มเลยเอามาหมด
ทีม PlasmaZ ปีนี้ได้ที่ 3 ครับ แต่ก่อนหน้านี้ เป็นทีมที่เป็นแรงบรรดาลใจ ให้ทีมไทยหลายๆ ทีม ไม่ยอมแพ้ และไม่หยุดที่จะพัฒนา
ผลการแข่งขัน update เข้าชมที่นี้ครับ http://www.robocup2009.org/137-0-results
3. Rescue Robot มี iRap_pro จาก ม.พระจอมเกล้าพระนครเหนือ ชนะมาอีกรอบ เป็นครั้งที่ 4 แล้ว ทีม iRap ของ ม.พระจอมเกล้าพระนครเหนือครับ
วีดีโอการ แข่งขันภายในงาน World Robocup Rescue 2009
วีดีโอ สาธิตการทำงานของหุ่นยนต์ ทีม IRAP_PRO
ผลการแข่งขัน http://www.robocup2009.org/172-0-results
(รูปจาก kucity.com ขอบคุณ อ.ปัญญาครับ สำหรับรูป กับการรายงานสด ข้างสนาม เร็วมากๆๆ ลุ้นแทน)
หลายคนเข้ามาชม เห็นเราได้อันดับต้น คงคิดว่า จัดระดับภูมิภาคหรือปล่าว เห็นแต่ มหาวิทยาลัยจากไทย ขอบอกว่า งานนี้จัดแบบ internation ครับ มีหลายทีมและจากหลายประเทศ ส่งเข้าแข่งขันครับ
แล้วแต่ล่ะทีมกว่าจะได้ขนาดนี้ ต้องใช้ความพยายามจริง เริ่มจากไม่มีอะไรเลย ใช้เวลาพัฒนาหลายปีนะครับ กว่าจะได้แชมป์ ตอนนี้ถ้าไม่มี SCG คงไม่รู้ว่าเรามีหุ่นยนต์ Rescue ชนะระดับโลกอย่างไรก้อขอให้เป็นกำลังใจกับทีมไทยด้วยนะครับ
ผมว่าจะหุ่นยนต์เป็นสิ่งประดิษฐ์แห่งความฝัน มันช่วยให้เยาวชนเราสนใจเทคโนโลยีกันมากขึ้นครับ
ตอนนี้ผมก้อรอรูปจากเพื่อนๆ น้องๆที่ไปแข่ง :D หวังว่าเขาจะมีเทคนิคกับระบบอะไรใหม่ๆ มาเล่าให้ผมฟังบ้าง ว่าไม่พูดถึงเรื่องนี้แล้ว แต่มันอดคันมือจะ ไม่พูดไม่ได้แล้ว เพราะว่า เดี่ยวกับมาไทย กลัวข่าวมันจะเงียบไปอีก เหมือนกันข่าววิชาการอื่นๆครับ
ส่วนภาพวีดีโอจากแต่ล่ะทีม รออีกแป็บ นะครับ อันนี้ไปชมวีดีโอ The Best of robocup 2009 Final Day กันไปก่อนครับ
ชมวีดีโออีกมากจากที่นี้ครับ http://www.robocup2009.org/306-0-video.html และใน youtube หากันได้เลยไม่ต้องรอทีวีครับ

รายงานพิเศษ “บอล ไทย” สู่ “บอล โลก” งาน World Robocup Small-size Soccer League 2009
ในที่สุด “บอลไทย” ก็ได้ไป “บอลโลก” และได้ประสบความสำเร็จสูงสุดด้วยการคว้าแชมป์โลกมาได้อีกครั้งเป็นสมัยที่ 2 ติดต่อกัน และที่กำลังกล่าวถึงนี้คือทีมหุ่นยนต์เตะฟุตบอลสร้างโดยทีมเยาวชนไทย
การเป็นแชมป์โลกหุ่นยนต์เตะฟุตบอลขนาดเล็ก ทีมไทยเริ่มเป็นแชมป์โลกเป็นครั้งแรก โดยทีม Plasma-Z จาก จุฬาลงกรณ์มหาวิทยาลัย เมื่อปี 2008 โดยงานชื่อเดียวกันแต่จัดที่ประเทศจีน
มาปีนี้ ปี 2009 จัดที่ เมือง Graz ประเทศ Austria ระหว่างวันที่ 29 มิ.ย.2552 ถึง 5 ก.ค.2552 ทีมไทยก็ได้เป็นแชมป์โลกอีกครั้ง ครั้งนี้ทำได้โดยทีม Skuba จาก มหาวิทยาลัยเกษตรศาสตร์ เป็นการชนะเลิศ 3 รางวัลซ้อน เป็น Triple Champ ได้แก่
1.รางวัลแชมป์โลก World Robocup 2009 จากการแข่งขัน Robocup Soccer ประเภท Small Size League
2.รางวัลชนะเลิศ Technical Challenge
3.รางวัล Best Extended Team Description Paper (ETDP)

ลักษณะการแข่งขันเป็นดังนี้ โดยขอยกตัวอย่างข้อมูลทางเทคนิคของ หุ่นยนต์ทีม Skuba ม.เกษตรศาสตร์
ทีมที่เข้าร่วมการแข่งขันจะต้องประดิษฐ์หุ่นยนต์ขนาดเล็กทีมละ 5 ตัว เพื่อแข่งขันฟุตบอล (ส่วนหุ่นยนต์ตัวสำรอง มีไม่จำกัด) ซึ่ง มีเวลาแข่งขันทั้งหมด 20 นาที แบ่งเป็นครึ่งแรก 10 นาที และครึ่งหลัง 10 นาที ทีมที่ทำประตูได้มากกว่าจะเป็นผู้ชนะ ลักษณะหุ่นยนต์จะเป็นทรงกระบอกขนาดเส้นผ่าศูนย์กลางไม่เกิน 18 เซนติเมตร และสูงไม่เกิน 15 เซนติเมตร โดยแต่ละทีมจะทำกระดาษแถบสีวงกลมติดตรงกลางเพื่อ เป็นการบอกว่าเป็นทีมชื่ออะไร เช่นใช้สีน้ำเงินคือทีม A และสีเหลืองคือทีม B เป็นต้น และจะต้องมีกระดาษแถบสีเพิ่มเติมที่มีสีไม่ซ้ำกับแถบสีตรงกลาง เพื่อเป็นการบอกเบอร์ Code หรือชื่อหุ่นยนต์นักเตะ ของแต่ละทีม
ลักษณะการทำงาน แต่ละทีมจะต้องทำให้หุ่นยนต์ทำงานโดยอัตโนมัติไร้คนควบคุมตลอดการแข่งขัน โดยเทคนิคที่ใช้จะใช้ระบบการมองเห็น (Vision System)โดย ใช้กล้องที่ติดอยู่ข้างบนของสนามแข่งขัน (ส่วน ใหญ่จะใช้กล้อง 2 ตัว ส่องดูสนาม กล้องละครึ่งสนาม แล้วนำภาพจาก 2 กล้องมาต่อกันเป็นภาพทั้งสนาม) กล้องจะทำการสื่อสารข้อมูลภาพเคลื่อนไหวของหุ่นยนต์ในสนามมายังเครื่อง คอมพิวเตอร์ แล้วเครื่องคอมพิวเตอร์จะทำการคำนวณภาพที่ได้แปลงมาเป็นพิกัด ความเร็วและทิศทางต่างๆ ของหุ่นยนต์ทั้งหมดทั้งของฝ่ายตนและฝ่ายตรงข้าม รวมถึงลูกบอลในสนาม ขอบสนาม และตำแหน่ง Goal ของสนาม โดยขณะที่กำลังคำนวณภาพอยู่นั้น ย่อมจะต้องเจอกับอุปสรรคต่างๆ เช่น แสงที่ไม่สม่ำเสมอตลอดทั้งสนาม เงาทั้งจากเสาคานของสนาม เงาจากผู้ชมที่อยู่รอบสนามที่แปรปรวนตลอดเวลา หรือแม้แต่เงาของหุ่นยนต์เอง นอกจากนี้จะต้องเจอกับอุปสรรคของสีของกระดาษที่ติดอยู่บนตัวหุ่นยนต์ ที่เมื่อเจอกับแสงตกกระทบและสะท้อนแล้ว จะมีค่าของสีที่ไม่สม่ำเสมอทั่วทั้งสนามและในทั่วทุกหุ่นยนต์ทุกตัว และยังไม่พอจะต้องเจอกับความบิดเบี้ยวของภาพจากกล้องทั้ง 2 ตัว เนื่องจากการใช้เลนซ์มุมกว้างที่ขอบของภาพจะเพี้ยนหรือโค้งจากความเป็นจริง ซึ่งปัญหาทั้งหมดนี้ ระบบการมองเห็นของโปรแกรมคอมพิวเตอร์จะต้องแก้ไขให้ได้ทั้งหมด ระบบการมองเห็นจึงจะทำงานได้อย่างมีประสิทธิภาพ ได้พิกัดต่างๆ ที่แม่นยำหรือผิดพลาดน้อยที่สุด

หลังจากนั้นโปรแกรมระบบการมองเห็นก็จะส่งข้อมูลสำคัญต่างๆ ไปยังโปรแกรมระบบสมองกลอัจฉริยะ (Artificial Intelligence) ที่มีการวางกลยุทธ์การเล่นไว้หลากหลายรูปแบบในแต่ละสถานการณ์ที่ แตกต่างกันหรือตลอดจนการทำนายหรือคาดการณ์ล่วงหน้าเพื่อชิงความได้เปรียบใน การเล่นเกมส์ในแบบทันทีทันใดในเวลาจริง (Real-Time System) ทั้งนี้ก็เพื่อให้หุ่นยนต์แข่งขันกันเองได้ โดยไม่มีการควบคุมหรือส่งสัญญาณให้กับหุ่นยนต์ที่กระทำโดยจากมนุษย์ทั้งสิ้น ในระหว่างที่มีการแข่งขัน โดยหลังจากโปรแกรมสมองกลอัจฉริยะได้คำนวณคาดการณ์ว่าหุ่นยนต์ทุก ๆ ตัวของทีมควรจะเคลื่อนที่ไปที่ตำแหน่งไหน ด้วยความเร็วเท่าไร ทิศทางใด และทำการเตะลูกบอลหรือไม่ ถ้าจะเตะจะต้องเตะลูกบอลแบบไหน ใช้แรงเท่าไร เตะแบบยิงลูกโด่ง ลูกเรียดพื้น หรือปั่นลูกบอลให้หมุนรอบตัวเองเพื่อใช้ในการดึงลูก ทั้งหมดที่กล่าวนี้ระบบก็จะทำการส่งข้อมูลเหล่านี้ไปยังหุ่นยนต์ทุกๆ ตัว ผ่านระบบเครือข่ายวิทยุไร้สาย และ มีการทำงานที่สอดประสานกันเป็น Team Work
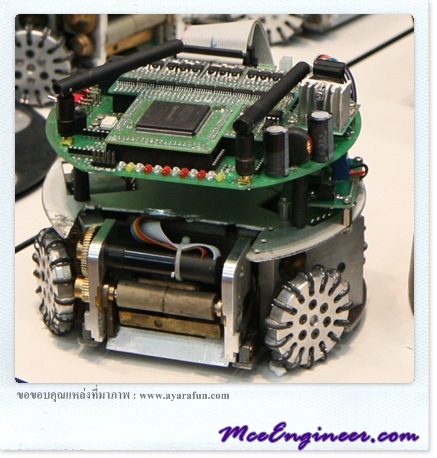
มาพิจารณาที่หุ่นยนต์แต่ละตัวบ้าง หุ่นยนต์แต่ละตัวจะได้รับคำสั่งให้ทำงานตามข้อมูลคำสั่งที่ได้รับ แต่ละตัวจะได้รับคำสั่งให้ทำงานที่แตกต่างกันตามที่ได้กล่าวไป โดยเมื่อได้รับคำสั่งแล้ว หุ่นยนต์จะส่งคำสั่งไปยังโปรแกรมฝ่ายควบคุมอัตโนมัติที่อยู่ในสมองกล คอมพิวเตอร์ขนาดเล็กของตัวหุ่นยนต์ ทำการควบคุมไปยังมอเตอร์ทุกตัวในหุ่นยนต์ ไม่ว่าจะเป็นมอเตอร์ที่ควบคุมล้อ หรือ มอเตอร์ที่ควบคุมชุดยิงลูกบอล เพื่อให้ทำงานได้ตามคำสั่ง ในช่วงนี้จะมีการคำนวณทางกลศาสตร์ที่ซับซ้อนเพื่อให้หุ่นยนต์เดินทางไปได้ ตามพิกัด ความเร็วและทิศทางตามที่กำหนด ถ้าเราเปิดฝาครอบหุ่นยนต์ออก แล้วดูภายในตัวหุ่นยนต์ เราจะพบว่า นอกจากจะมีระบบทางกลไก (Machanic) ที่ซับซ้อนแล้ว ก็ยังมีวงจรอิเลคทรอนิกส์และคอมพิวเตอร์ขนาดเล็กที่ซับซ้อนในการควบคุมหรือ ขับมอเตอร์ มีระบบ Sensor เพื่อการตรวจจับลูกบอลใน ระยะประชิดด้วยแสงอินฟาเรด ระบบการวัดระยะการเคลื่อนที่ของล้อ ระบบวงจรสะสมกำลังไฟฟ้าเพื่อทำการยิงลูกบอลด้วยความเร็วหรือความแรงได้หลาก หลายรูปแบบในทันทีทันใด และสุดท้ายยดระยะการ เคลื่อนที่ของล้อหุ่นยนต์ทีม ทางที่กำหนดเพื่อการมองเห็นทันทีทันใด ระบบระบบ วงจรรับ-ส่งวิทยุสื่อสารกับเครื่องคอมพิวเตอร์ตัวแม่ที่เป็น ตัวกำหนดกลยุทธการเล่นและระบบการมองเห็น
โดยทางทีม Skuba จะ มีวงรอบของการทำงานตามที่กล่าวมาทั้งหมดในอัตราภายใน 1 วินาที ทั้งระบบทำงานพร้อมกันได้ถึง 62 วง รอบการทำงาน หรือก็คือ ทำงานตามที่กล่าวมาทั้งหมดได้เสร็จภายในเวลา 0.016 วินาที ซึ่งเท่ากับอัตราของ Frame Rate ของกล้องจับภาพ สำหรับรายละเอียดทางเทคนิคเพิ่มเติมที่ลงลึก ท่านสามารถอ่านประกอบได้จาก Web นี้http://iml.cpe.ku.ac.th/skuba/archive/SkubaETDP2009.pdf
ถ้าจะ download Clip VDO และ ภาพนิ่งต่างๆ จากการแข่งขันให้ไปที่ Web นี้ http://kucity.com
หรือจะดูกติกาและผลการแข่งขัน สามารถเข้าดูได้ที่ Web ทาง การคือ
http://www.robocup2009.org

ทีนี้เรามา พูดถึง เรื่องผลงานรางวัลชนะเลิศที่ทางทีม Skuba ได้รับ มีที่มาที่ไปอย่างไร
สำหรับรางวัลชนะเลิศแชมป์โลกนั้น เกิดจากการแข่งขันที่มีการแบ่งสายเป็น 4 สนาม โดยแต่ละสนามจะมีการแข่งขันแบบพบกันหมด แล้วคัดเลือกเอาทีมที่มีแต้มคะแนนผลงานสูงสุด3 อันดับ แรก ของแต่ละสนามมาเข้าสู่รอบต่อไป คือคัดให้เหลือ 8 ทีม สุดท้าย โดยมีทีม CMDragons จาก USA เป็น ที่ 1 ในสาย A ทีม RoboDragons จาก Japan เป็น ที่ 1 ในสาย B ทีม Plasma-Z จาก Thailand เป็นที่ 1 ใน สาย C และ ทีม Skuba จาก Thailand เป็นที่ 1 ใน สาย D หลังจากนั้นก็มีการแข่งขันเข้าสู่รอบ 4 ทีมสุดท้าย ทีมที่ได้เข้ารอบ 4 ทีมสุดท้ายได้แก่ ทีม Odens จาก Japan , ทีม RoboDragons จาก Japan , ทีม Plasma-Z จาก Thailand และ ทีม Skuba จาก Thailand
หลังจากนั้นก็เข้า สู่รอบ Semifinals ผลก็คือ ทีม RoboDragons ชนะทีม Odens ไปด้วยประตู 2:0 และ ทีม Skuba ชนะทีม Plasma-Z ไป ด้วยประตู 7:1 ซึ่งในการแข่งขันในรอบนี้กลายเป็นว่า ทีมไทยเจอกับทีมไทยด้วยกันเอง
หลังจากนั้นก็เป็น รอบ Final ทีม Skuba ชนะทีม RoboDragons ด้วยประตู 11:1 คว้า แชมป์โลกไปครอง โดยมีทีม RoboDragons จาก Japan ได้ที่ 2 และ ทีม Plasma-Z ได้ ที่ 3
สถิติการทำประตู ของทีม Skuba ส่วนใหญ่จะทำประตู 10:0 เป็น ส่วนมาก ส่วนหนึ่งนั้นอาจเป็นเพราะความเสถียรของหุ่นยนต์ และ ระบบ ปัญญาประดิษฐ์ (Artificial Intelligence) ที่ทีมเราทำได้ดีและตลอดจนความเร็วที่เร็วมาก การส่งลูกและการยิงลูกบอลทำประตูที่เฉียบคมและแม่นยำมาก จึงทำให้ทีมของเราประสบความสำเร็จ
และความสำเร็จด้าน ความเสถียรของหุ่นยนต์นี้ มีผลพวงทำให้ทีม Skuba สามารถ ทำคะแนนรวมได้สูงสุดในการแข่งขัน Technical Challenge ตาม ไปด้วย ซึ่งเป็นการแข่งขันทดสอบความสามารถของหุ่นยนต์นักเตะโดยจะต้องทำการทดสอบ 3 แบบทดสอบ คือ ทดสอบความสามารถในการเคลื่อนที่และนำทางผ่านสิ่งกีดขวางด้วยความเร็วสูงสุด เท่าที่ยังควบคุมหุ่นยนต์ได้ (Navigation) ทดสอบความสามารถใน การส่งบอลไปยังหุ่นยนต์ตัวอื่นแล้วจึงค่อยทำการยิงลูกบอลเข้า Goal (Passing and Shooting) และทดสอบการเล่นฟุตบอลแบบผสมทีมกับทีม อื่นๆ (Mixed Team)
โดยทีม Skuba ได้เป็นเจ้าของสถิติโลกด้านการเคลื่อนที่ได้เร็วที่สุดที่ยังควบ คุมได้ด้วยสถิติ 3 เมตรครึ่งต่อวินาที (ปี 2008) และ เจ้าของสถิติโลกการทำประตูได้รวดเร็วสุดในเวลา 2 นาที ยิงประตูได้ 9 ประตู (ปี 2009)
จึงทำให้ทีม Skuba ชนะเลิศได้รางวัลมาครองอีกรางวัลคือ รางวัลชนะเลิศ Technical Challenge
ส่วนรางวัลตัวสุดท้ายที่ได้ คือ รางวัล Best Extended Team Description Paper (ETDP)
รางวัลนี้ถูกพิจารณาว่าทีมไหนจัดทำเอกสารได้ดี แบบว่าเปิดเผยข้อมูล อธิบายได้ชัดเจน โดยทีมทั้งหมดที่เข้าร่วมแข่งขัน จะเป็นผู้ Vote ให้ ซึ่งคล้ายๆ เอกสารทางวิชาการ ที่เราได้เผยแพร่ผลงานวิจัยหุ่นยนต์ชุดนี้ เพื่อให้วงการหุ่นยนต์ระดับโลกนี้ ได้เกิดการต่อยอด และเกิดการพัฒนาสิ่งใหม่ๆ โดยผลงานเอกสารชุดนี้ ได้บอกรายละเอียดผลการทดลองด้วย ตามหลักของการเขียน Paper งาน วิจัย แบบเท่าที่จะเตรียมการทำกันได้ ท่ามกลางทีม Skuba ก็ มีภาระที่จะต้องทำ Hardware และ Software เพื่อใช้สำหรับการแข่งขัน ทีมงานก็ยังพอปลีกเวลามาทำผลงานทางเอกสารให้ดีๆ ซึ่งใช้เวลาทำประมาณ 4 เดือน โดยทำกระบวนการวิจัยดังต่อไปนี้
1.คิดค้นทฤษฎีใน การเคลื่อนที่ของหุ่นยนต์ SSL (Small-Size League) แบบ ใหม่ ที่ทำให้หุ่นยนต์เคลื่อนที่ได้ถูกต้อง แม่นยำ เพิ่มมากขึ้น และ สามารถปรับตัวเองให้เข้ากับสภาพของสนามแข่งขันได้
2.นำทฤษฏีที่ได้นำ ไปประยุกต์ให้เหมาะสมกับการนำไปใช้ในตัวหุ่นยนต์
3.ทำการทดสอบ เก็บข้อมูล และวิเคราะห์ผลลัพธ์ จนแน่ใจว่า ทฤษฎีใหม่สามารถปรับปรุงประสิทธิภาพของหุ่นยนต์ได้อย่างน่าพอใจ
ทั้งนี้สำหรับรางวัลตัวสุดท้ายนี้ สำคัญยิ่งกว่าตำแหน่งแชมป์โลกเสียอีก เพราะตำแหน่งแชมป์โลกอาจเปลี่ยนมือได้ อยู่ได้ไม่นาน แต่ทฤษฏีของหุ่นยนต์ที่เราวิจัยได้ขึ้นมา จะอยู่ได้นานและถูกอ้างอิงตลอดเวลา จนกว่าจะมีทฤษฏีที่ดีกว่ามายกเลิก นี่เป็นเรื่องวิชาการล้วนๆ
บทสัมภาษณ์ ทีม Scuba แชมป์ Robocup2009 ณ.ประเทศเยอรมันนี
ขอขอบคุณสำหรับข้อมูลอันเป็นประโยชน์ อาจารย์ปัญญา ภาควิศวกรรม ม.เกษตรศาสตร์

